
La charge utile de la mission MICROSCOPE est constitué d’un seul instrument appelé T-SAGE (Twin Space Accelerometre for Space Gravity Experiment).
C'est un double accéléromètre, chacun constitué de deux senseurs inertiels (ou masses d’épreuve). Il a été conçu grace à l'expérience unique du laboratoire de Mesures Physiques de l'ONERA, expert mondial dans le domaine de l'accélérométrie spatiale ultrasensible.
Bien qu'utilisant des technologies éprouvées et améliorées depuis 40 ans, T-SAGE est particulier par sa forme cylindrique.
Image
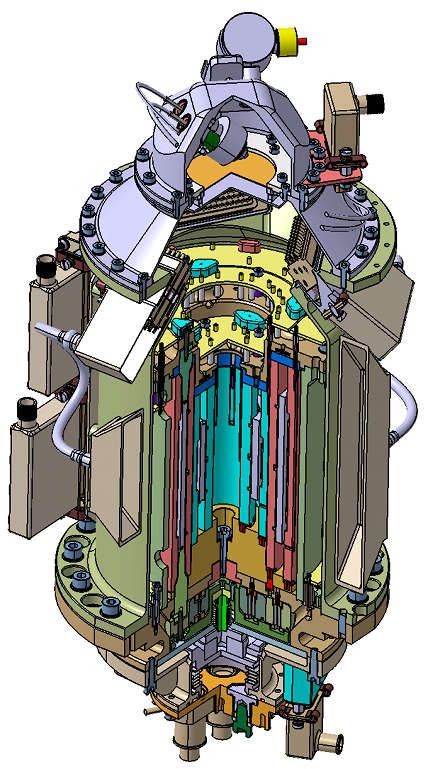
Sensor Unit drawing | Image
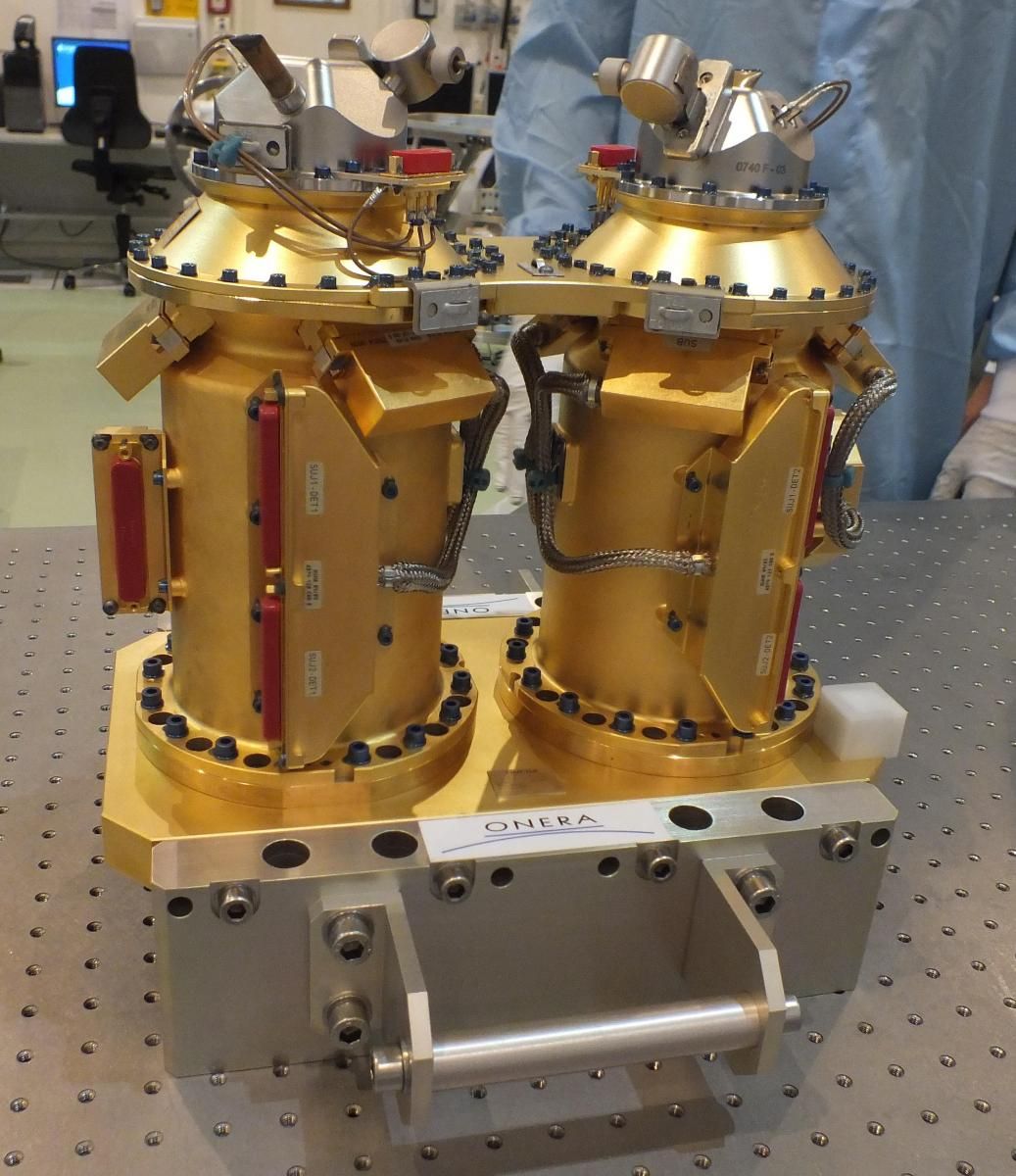
Flight Model of the two SU (on right SU-REF, on left SU-PE) |
L'accéléromètre (ou Sensor Unit - SU) dédié au test du principe d'équivalence ou SU-PE comprend une grosse masse en Titane et une petite masse en Platine-Rhodié (PtRh10 : 10% de Rhodium). L'autre SU, appelé SU-REF, est totalement identique au SU-PE (géométrie, composition, méthode de réalisation et d'intégration) à la seule exception de la grosse masse qui est en Platine-Rhodié. On attend donc pour cet accéléromètre aucun signal de violation mais une signature de référence pour les perturbations et une estimation de la précision de traitement des données.
Pour traiter les signaux issus du capteur SU, on associe à chacun des SU une électronique analogique FEEU (Front End Electronique Unit). Cette électronique embarque les chaines capacitives de mesure, les amplificateurs applicant les tensions sur les électrodes, les tensions ultra-stables de référence, les convertisseurs analogiques/numériques ou numériques/analogiques et un FPGA permettant la communication avec l'électronique numérique ICU (Interface Control Unit).
Image
FEEU (MQV1) modèle de vol |
Image
ICUME = 2 stacked ICU (MV1 + MV2) |
Chaque FEEU est associé à un ICU. Les deux ICU sont montés l'un sur l'autre pour former un seul boitier mécanique (ICUME) mais indépendant fonctionnellement.
L'ICU embarque un FPGA, un DSP et un convertisseur d'alimentation. Le FPGA permet à la fois la communication avec le FEEU et l'ordinateur de bord central du satellite (OBC). Le DSP contient le logiciel de vol qui calcule les tensions nécessaires à appliquer sur les électrodes et compile les données à fournir au satellite qui les transmet ensuite au sol.
Le principe de fonctionnement
Un accéléromètre électrostatique consiste à suspendre par des forces électrostatiques une masse d'épreuve. Ce contrôle est réalisé le long des 3 directions de translation et aussi autour de ces 3 directions: contrôle 6 axes de la masse d'épreuve. Pour cela on dispose autour de la masse d'épreuve d'un système d'électrodes qui vont former de multiples couples capacitifs (ou condensateur) sensibles au déplacement.
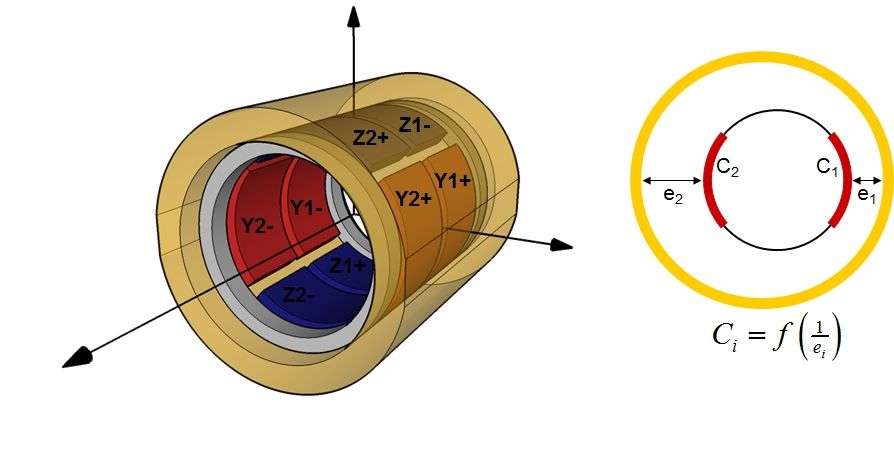
Dans le cas de l'illustration, un déplacement radial de la masse d'épreuve (symbolisée par le cercle jaune) rapproche cette dernière de l'électrode de droite et l'éloigne de l'électrode de gauche. La différence des capacités électrode/Masse d'épreuve du coté gauche par rapport au coté droit est une fonction du déplacement. Dans le cas des accéléromètres développés à l'ONERA, les déplacements étant de l'ordre de quelques microns, la différences de capacité est proportionnelle au premier ordre au déplacement. On obtient ainsi, en mesurant la variation de capacité, une mesure très précise du déplacement.
L'ONERA a développé depuis des décénies des chaines de mesures capacitive permettant une sensibilité de 10-7pFHz-1/2. Dans le cas de T-SAGE, en tenant compte de la géométrie des masses d'épreuve et des électrodes, cette performance se traduit pas une résolution de déplacement de 10-11m.Hz-1/2. C'est l'électronique FEEU (Front End Electronique Unit) qui est proche du capteur qui traduit cette information de déplacement en tension qui sera pris en compte dans l'asservissement. Le rôle de l'asservissement, qui est implanté ici dans une électronique numérique (ICU = Interface Control Unit), est de calculer les tensions nécessaires qu'il faut appliquer sur les électrodes afin de générer des forces électrostatiques qui vont ramener la masse d"épreuve au centre des deux capacités illustrées plus haut.
En fait il existe 6 chaines de mesures capacitives et de contrôle de la masse d'épreuve pour l'asservissemenr selon les 6 degrés de liberté. On a donc 12 chaines de mesure et de controle par FEEU. Les données sont codées sur 24 bits et traitées par le DSP de l'ICU qui réalise les calculs sur 40 bits pour ne rien perdre de la précision des mesures ou ne pas introduire de perturbations numériques lors du conditionnement des tensions à appliquer sur les électrodes.
La boucle d'asservissement des 12 voies est réalisée à 1024Hz (mesure et action). Les données de l'asservissement sont également traitées et filtrées hors de la boucle d'asservissement pour les ramener à une cadence de 1Hz (données de position, température, tensions de référence, status) et de 4Hz (données d'accélérations linéaires et angulaires) compatible avec les capacités de stockage à bord de l'OBC.